|
减速机是人形机器人的“运动韧带”——它决定了关节能否在10倍体重冲击下精准执行0.01°的位置校准。 一、减速机的核心使命:从动力源到精密动作的转化枢纽 在双足机器人的运动系统中,减速机承担着扭矩放大、转速调节、运动精度控制三重核心职能。以膝关节为例:落地瞬间需承载6-10倍体重的冲击载荷,而手臂关节每秒需完成5-7次动态位置校正——这一切依赖于减速机将电机的高转速低扭矩输出,转化为关节所需的低转速高扭矩动作。 技术本质:通过齿轮啮合传动比实现“机械杠杆效应”。例如谐波减速器利用柔轮弹性变形达成50:1至160:1的减速比,使输出扭矩倍增,同时将电机转速降至关节可控范围。
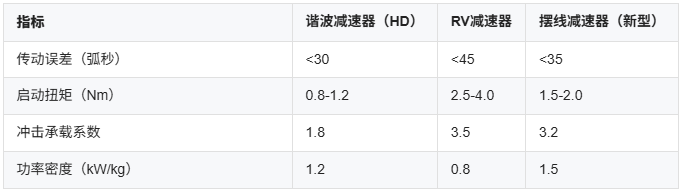
二、主流减速机技术路线对比:如何适配人形机器人的极限需求?
工程选择逻辑:
精度敏感区(如视觉跟踪手部):优选谐波减速器,其齿形误差控制在微米级,确保抓取精度; 动力承载区(如跳跃膝部):RV或新型摆线减速器,TiN涂层齿轮将摩擦系数压至0.08以下,磨耗降低72%。
三、极限工况下的技术挑战:工程师如何突破瓶颈? 1. 动态精度与强度的悖论
手臂关节每秒5-7次的突发位姿修正,要求减速机在0.2秒内响应并稳定输出——这需要解决弹性变形导致的回差问题。方案:谐波减速器柔轮采用变壁厚设计+有限元拓扑优化,使应力分布均匀化,寿命提升40%。
2. 轻量化与高负载的冲突
腰部旋转模块每平方厘米需承受2.3kN冲击扭矩,但重量增加1kg会导致整机能耗上升15%。突破:
材料:齿轮钢基体渗氮处理,表面硬度升至HRC60; 结构:RV减速器二级传动采用摆线针轮+行星齿轮复合架构,空间利用率提升30%。
四、前沿演进方向:从组件优化到系统重构 1. 传动效率革命:一体化模组 将电机、编码器、减速器集成设计,消除联轴器损耗,传动效率从传统85%跃升至92%以上。更关键的是:通过电流反推关节外力,实现碰撞感知。 2. 新型摆线减速器的崛起 摆线针轮传动因减速比大、刚性强成为下肢关节替代方案。中国已突破柔性减速系统技术,成本降至传统产品的1/10。预计2030年人形机器人领域渗透率超35%。 3. 数字孪生测试体系 基于虚拟样机的多物理场仿真平台(包含热力-振动-磨损耦合分析),将减速器开发周期从18个月压缩至6个月。
五、终极目标:构建“类人生理特性”的关节系统 未来的减速机将不再仅是传动部件——它需要融合可变刚性(模仿人体肌肉的刚度调节)与能量回收(行走时膝关节制动发电)。德国DLR研究所已在实验压电材料嵌入齿轮,实现传动与传感功能一体化。
当减速机的动态响应时间突破10毫秒阈值,人形机器人的运动将真正逼近人类的流畅性与适应性。
减速器作为人形机器人的“运动关节”,其技术演进直接决定机器人的灵活性与应用边界。随着国产厂商在谐波、摆线领域的持续突破,以及特斯拉等巨头量产计划的推进,减速器产业正迎来从“精密部件”到“规模化核心组件”的历史性跨越。未来三年,轻量化设计与成本控制的突破,将成为人形机器人走进消费市场的关键钥匙。
|  |Archiver|小黑屋|我赚外链论坛
( 浙ICP备12044378号-2 )
|Archiver|小黑屋|我赚外链论坛
( 浙ICP备12044378号-2 )





 发表于
发表于